随着各国不断加大研发力度,水面无人艇进入了一个快速发展阶段,但与之匹配的布放回收技术却处于相对滞后的状态。受航程限制,水面无人艇通常由母船搭载至指定区域后,布放到水面开始自主作业;作业结束后再由回收系统收回至母船甲板。目前无人艇布放回收需要人力上下无人艇,参与挂接无人艇等操作,效率低、危险性大,只适用于低航速、低海况、试验航次情形。因此,研制合理、有效的自主布放回收系统可大幅度提高无人艇的安全性、自主性和工作效率。
考虑到我国目前大量舰船装备针对有人工作艇的吊放式布放回收系统,上海大学无人艇工程研究院通过大量探索和技术积累,从实际应用出发,突破了装置一体化拓扑优化设计、高海况新型锁定释放机构设计、自主回收柔顺控制策略等关键技术难题,研制了一套新型吊放式无人艇自主布放回收系统。这套新型布放回收系统可实现3吨级无人艇在4级海况下安全、可靠地布放回收。布放回收系统包括浮动托架、对接锁定释放装置、自主回收控制系统等。上海大学无人艇工程研究院在黄海海域对该套布放回收系统进行了海上测试。
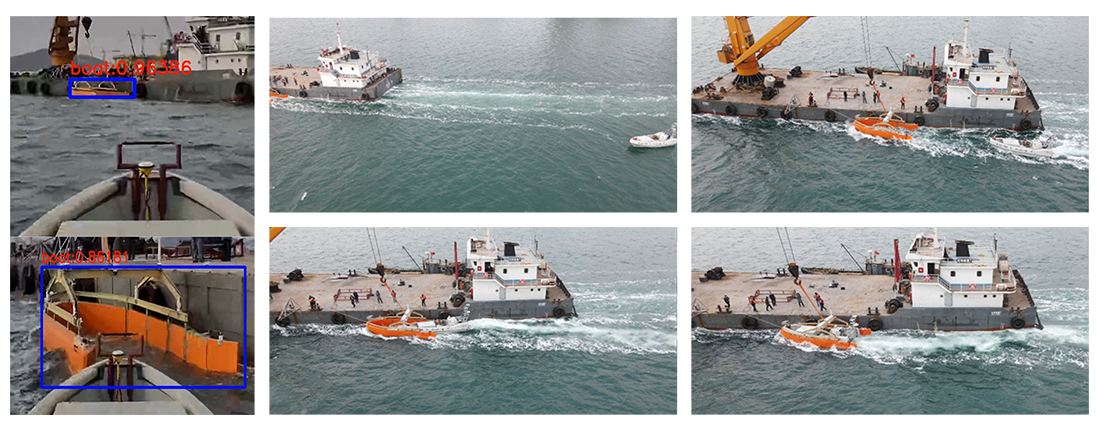
自主对接 自主回收过程
在海试中,该布放回收系统成功实现了母船静止和带速两种条件下,对目标无人艇地自主布放回收过程,完成了多项性能指标考核,达到了国际领先水平。该布放回收系统的研制成功将极大提升我国无人艇在“深、远”海的部署和作业能力,提高我国海洋智能化装备水平,缩短我国与世界海洋强国的差距。
